
Page 155 - 安防19年3月刊_正刊
P. 155
通过对目标物体的形状以及纹理(颜色等)进行 字符识别:对分割后的字符进行模式识别,
建模,去掉大部分形状。 就可以识别出输入的字符图像。
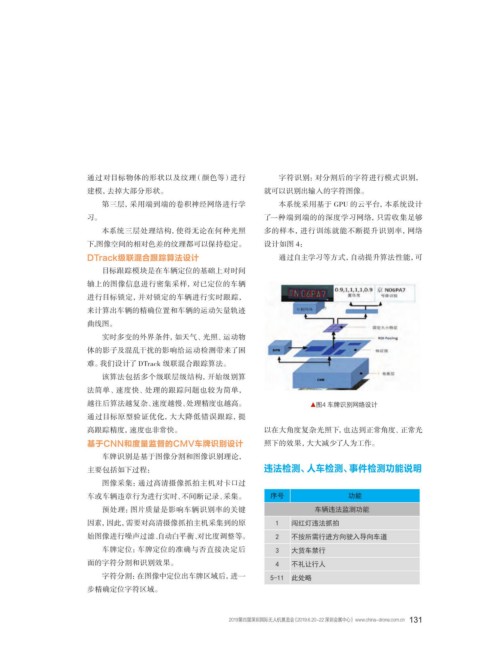
第三层,采用端到端的卷积神经网络进行学 本系统采用基于 GPU 的云平台,本系统设计
习。 了一种端到端的的深度学习网络,只需收集足够
本系统三层处理结构,使得无论在何种光照 多的样本,进行训练就能不断提升识别率,网络
下,图像空间的相对色差的纹理都可以保持稳定。 设计如图 4:
DTrack级联混合跟踪算法设计 通过自主学习等方式,自动提升算法性能,可
目标跟踪模块是在车辆定位的基础上对时间
轴上的图像信息进行密集采样,对已定位的车辆
进行目标锁定,并对锁定的车辆进行实时跟踪,
来计算出车辆的精确位置和车辆的运动矢量轨迹
曲线图。
实时多变的外界条件,如天气、光照、运动物
体的影子及混乱干扰的影响给运动检测带来了困
难。我们设计了 DTrack 级联混合跟踪算法。
该算法包括多个级联层级结构,开始级别算
法简单、速度快、处理的跟踪问题也较为简单,
越往后算法越复杂、速度越慢、处理精度也越高。 ▲图4 车牌识别网络设计
通过目标原型验证优化,大大降低错误跟踪,提
高跟踪精度,速度也非常快。 以在大角度复杂光照下,也达到正常角度、正常光
基于CNN和度量监督的CMV车牌识别设计 照下的效果,大大减少了人为工作。
车牌识别是基于图像分割和图像识别理论,
主要包括如下过程: 违法检测、人车检测、事件检测功能说明
图像采集:通过高清摄像抓拍主机对卡口过
车或车辆违章行为进行实时、不间断记录、采集。 序号 功能
预处理:图片质量是影响车辆识别率的关键 车辆违法监测功能
因素,因此,需要对高清摄像抓拍主机采集到的原 1 闯红灯违法抓拍
始图像进行噪声过滤、自动白平衡、对比度调整等。 2 不按所需行进方向驶入导向车道
车牌定位:车牌定位的准确与否直接决定后 3 大货车禁行
面的字符分割和识别效果。 4 不礼让行人
字符分割:在图像中定位出车牌区域后,进一 5-11 此处略
步精确定位字符区域。
2019第四届深圳国际无人机展览会(2019.6.20-22 深圳会展中心) www.china-drone.com.cn 131
భခඌ JOEE ྒ௹